Ich habe heute meinen Kinect-Sensor bekommen und natürlich prompt versucht ihn an meinem Mac anzuschließen. Das war kein leichtes Unterfangen, aber ich will es im Folgenden erklären. Warnung: Wenn man noch nie oder nur sehr selten im Terminal gearbeitet hat, keine Ahnung hat was git, MacPorts etc. ist, dann sollte man es vielleicht besser lassen, oder viel Zeit und Ehrgeiz mitbringen. Und nun zur Anleitung: Man sollte sich zunächst folgendes besorgen:
- git
- XCode (am besten nur die Command Line Tools - man braucht einen kostenlosen Apple Developer Account)
- MacPorts
Hier wird erklärt wie man vorgehen sollte: http://openkinect.org/wiki/Getting_Started#Manual_Build_under_OSX Bei mir kam es zu folgender Fehlermeldung:
libtoolize or glibtoolize was not found! Please install libtool
Das behebt man durch die Installation der libtools über MacPorts
sudo port install libtools
Anschließend eine weitere Fehlermeldung
./autogen.sh: line 15: aclocal: command not found
Um dies zu verhindern, musste ich autoconf und automake installieren
sudo port install autoconf & sudo port install automake
Danach die Datei configure.ac bearbeiten und dort AM_CONFIG_HEADERS in AC_CONFIG_HEADERS ändern. Jetzt sollte alles durchlaufen und man findet das Programm glviewer im Verzeichnis “libfreenect/build/bin/”. Starten kann man das Ganze mit:
./glviewer
Vorher sollte man aber noch die Kinect anschließen. Nun sollte man in etwa so etwas sehen:

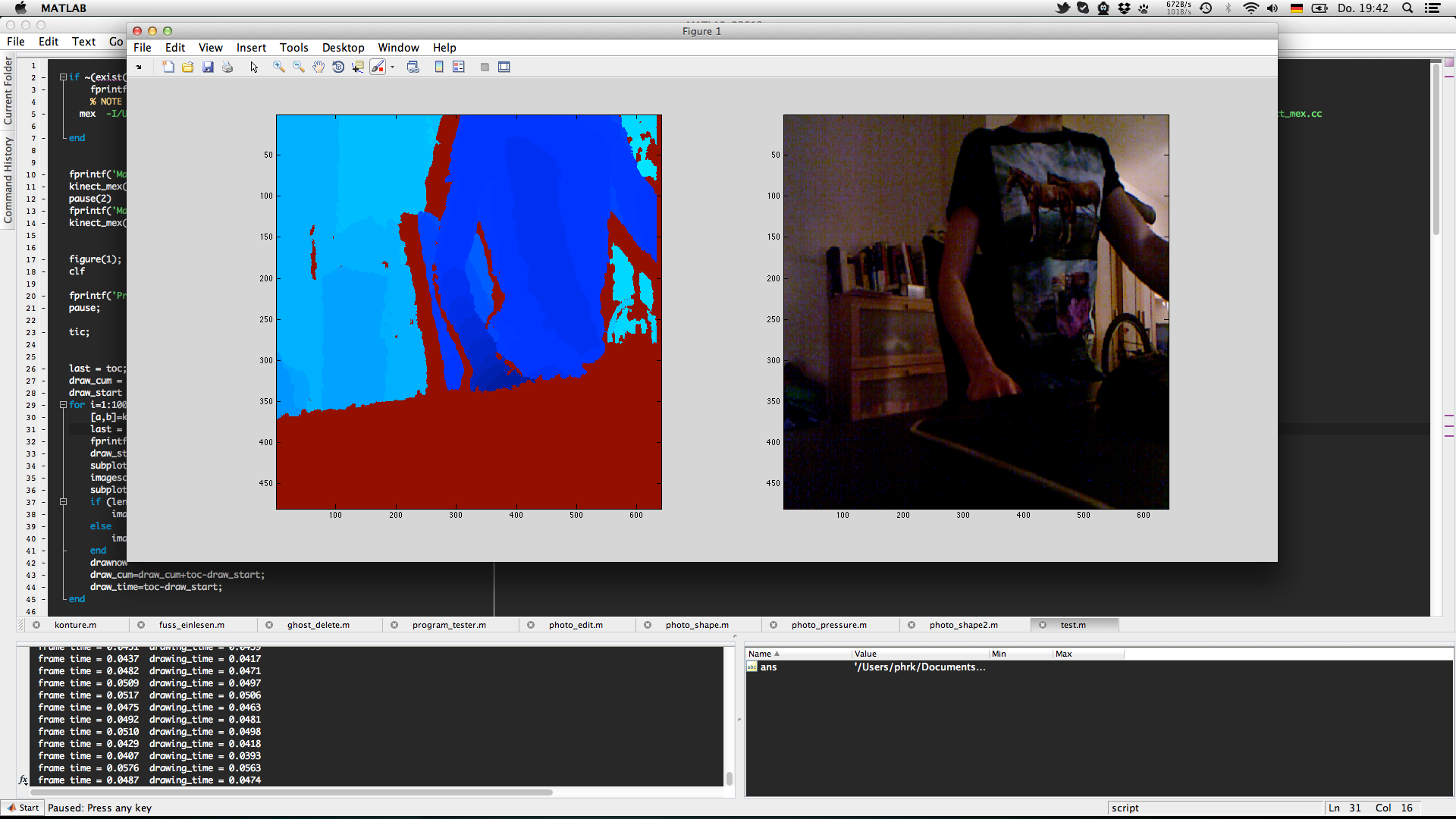
Um den Kinect-Sensor auch in Matlab verwenden zu können, besucht man die Seite http://acberg.com/kinect/ und lädt sich dort das Code-Paket herunter. Im Matlab-Code muss man noch verschiedene Pfade anpassen. Startet man nun das Programm, wie sollte es auch anders sein, kommt es zu einem Fehler. gcc-4.2 und g++-4.2 konnten in mex nicht gefunden werden. Um dies zu beheben bearbeitet man nun die Datei “/Applications/MATLAB_R2012a.app/bin/mexopts.sh” und ändert dort bei CC das “gcc-4.2” zu “llvm-gcc-4.2”, bei CXX das “gcc-4.2” zu “llvm-g++-4.2” und bei SDKROOT den Pfad zu “/”. Abschließend führt man in Matlab den Befehl “mex -setup” aus und wählt die Option 1. Wenn alles geklappt hat, sollte man nun nach erneutem Start so etwas sehen:
Man sollte beachten, dass der Vorgang hochgradig von der Systemkonfiguration abhängig ist. Mein System war OS X 10.8.2 XCode 4.6 und Matlab 2012a. Für die Arbeit im Terminal kann ich iTerm2 empfehlen. Zur Bearbeitung von Dateien Sublime Text. Außerdem möchte ich darauf hinweisen, dass ich mir das nicht alles im Zuge der Kinectinstallation angeeignet habe, also nicht gleich aufgeben, wenn es nicht auf Anhieb klappt!
Ich werde hier berichten, wenn ich Interessantes mit der Kinect angestellt habe.